
Farbod Khoshnoud
Associate Professor
Electromechanical Engineering Technology, College of Engineering
Phone number
909.869.2588 (there is no voicemail)
Office location
Office hours
M W | WELCOME ANYTIME.
Research
-Nature and Biologically inspired Dynamic Systems
-Quantum Multibody Dynamics, Robotics, and Autonomy*
-Uncertainty Quantification for engineering Systems
Research Presentation March 2021
![]()
An overview of our research in Self-powered and Nature/Bio-inspired Systems, and Quantum Robotics and Autonomy is summarized in Section 2 of this [PDF].
Research Videos are available on Youtube Channel. Please Click here to see.
The wikipedia page on Quantum Robotics:
https://en.wikipedia.org/wiki/Quantum_Robotics
*For the first time, we are tackling the interface of Quantum Science and Technology, and Robotic Systems Autonomy, under the topic of Quantum Robotics. We want to bring the two areas of Quantum Technologies and Robotics/System Autonomy together in order to explore the opportunities at the interface that offer potential for future applications in advanced autonomy, mechatronics, autonomy, security and cyber-physical systems in multiple domains, going beyond existing techniques. Our research is focused on the engineering applications of quantum paradigms (protocols, algorithms, sensing and control techniques) that will enable new applications and capabilities for increased autonomy of macroscopic systems as robotic platforms (not the aspects of the science of Quantum, nor quantum computing alone). The research includes the experimental aspects of quantum entanglement and cryptography that can be demonstrated today in the lab, and their integration and testing with multi-agent robotic controls. Our Quantum Multibody Dynamics research is an initiative with applications to robotics, control, and autonomy with unmatched quantum capabilities such as Guaranteed Security, Ultimate Speed for control, and entanglement, which allows capabilities beyond any classical and existing engineering techniques in cooperative multi-agent robotics, controls, and autonomy. We are also interested in the compatibility and adaptability of quantum technologies and classical robotic systems from the mechatronics point of view. This original and pioneering research is carried out by Dr. Farbod Khoshnoud (from California State Polytechnic University, Pomona, and a research affiliate at JPL), Dr. Marco Quadrelli (from NASA JPL, Caltech), Professor Ibrahim I. Esat (from Brunel University, London, UK), and Professor Clarence W. De Silva (from the University of British Columbia), For some information about this research please see the preprint of some of our papers available here: https://arxiv.org/search/?query=khoshnoud&searchtype=all&source=header
Click here for the video introducing Quantum Multibody Dynamics, Robotics, and Autonomy.
"At the rate that quantum mechanics field is developing, I think that we will need terms such as "quantum engineering" to keep up with the opportunities." By Professor Steven W. McCauley, Department of Physics and Astronomy, California State Polytechnic University, Pomona, 2019.
Quantum Engineering special issue of the Journal of Mechatronic Systems and Controls
Submission due 15 February 2020 via: https://www.editorialmanager.com/msc/default.aspx
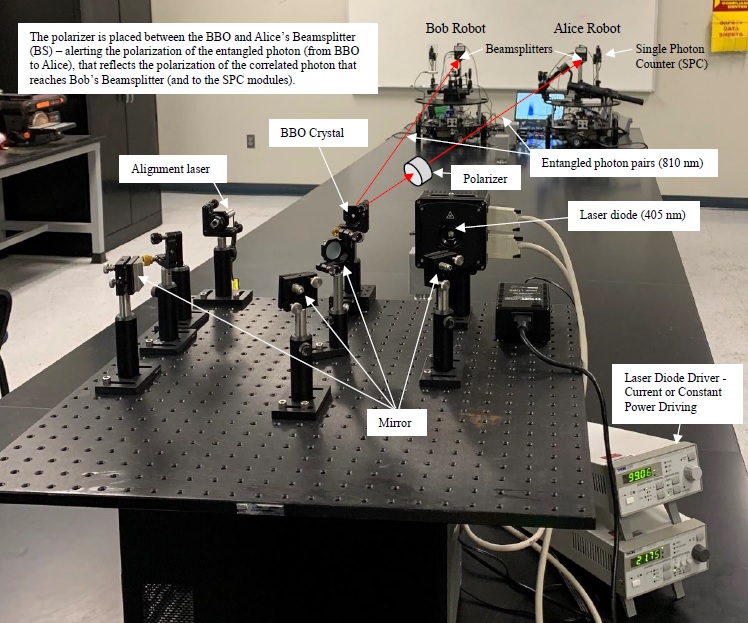
Quantum Entangled Robots (Sharing entangled photons)

Quantum Entangled Robots Alice and Bob sharing entangled photons
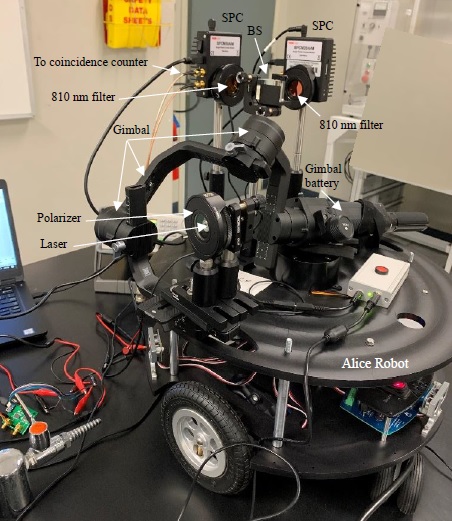
Alice Robot
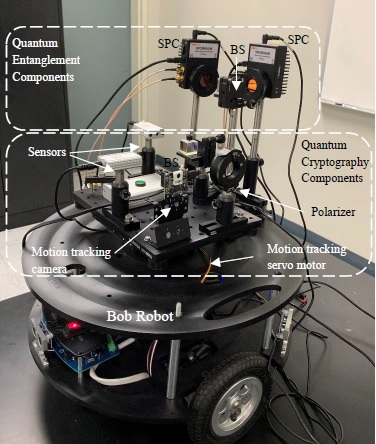
Bob Robot
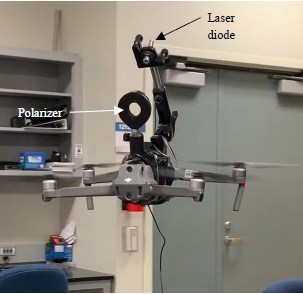
Alice Drone
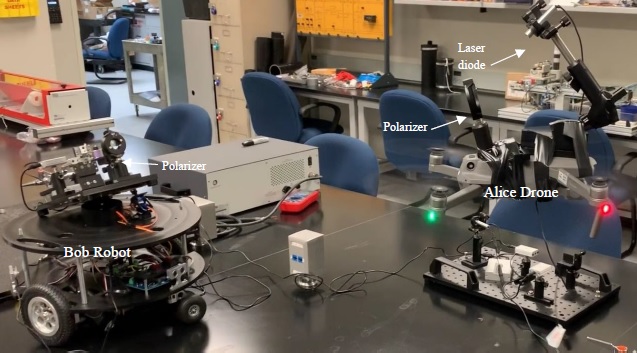
Alice Drone sending polarized photons to Bob Robot