Robotics and Automation


Overview
Robotics and Automation
Modern manufacturing requires robots capable of handling diverse parts with varying shapes, orientations, and motion. In smart factories, robots must grasp and regrasp moving and stationary objects for efficient assembly and transfer. Yet most systems rely on static tasks and fixed paths, limiting adaptability. Limited research on dynamic grasping and reorientation continues to constrain advanced automation.
Subproject 3
Motion, Grasp, and Regrasp Planning of Manipulator Robots for Agile Manufacturing and Assembly
Goal
The goal of this subproject is to address these gaps by developing methods and algorithms for autonomous robotic systems to perform advanced grasping and regrasping in dynamic settings.
By integrating techniques such as AI, sophisticated motion planning, and high-resolution sensors, the initiative aims to enhance robots’ real-time adaptability, precision, and efficiency. Leveraging innovative approaches, including haptic-based deep learning and massively parallel reinforcement learning, the project seeks to optimize robotic grasping and regrasping processes, meeting the demands of highly dynamic manufacturing environments.
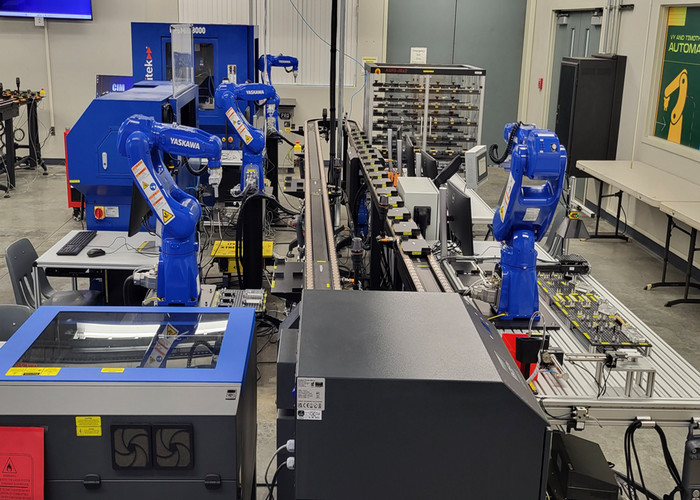
The proposed Smart Factory integrates three layers:
- The Physical Layer, comprising manufacturing hardware like conveyors, CNC machines, a quality control station, ASRS, robotic arms, a mobile robot, and sensors
- The Digital Layer, a real-time simulation of the Physical Layer via 3D models connected to sensors
- The Virtual Layer, enabling user interaction with digital components through AR/VR technologies.
Outcome
The outcomes of this subproject will lead to a system capable of efficiently handling all material handling and assembly tasks while effectively responding to the dynamics and uncertainties inherent in a typical manufacturing environment.

Principal Investigator
Dr. Ellips Masehian
Dr. Ellips Masehian is an associate professor at the Industrial and Manufacturing Engineering Department at Cal Poly Pomona. He received the B.S. and M.S. degrees in Industrial Engineering, both from Iran University of Science and Technology, Tehran, with honors, and a Ph.D. degree from Tarbiat Modares University. Dr. Masehian is one of the Co-PIs for the CREST-RASM grant.
Research Faculty and Staff
